4.4 儌乕僞偺摦嶌
丒儌乕僞僪儔僀僶IC
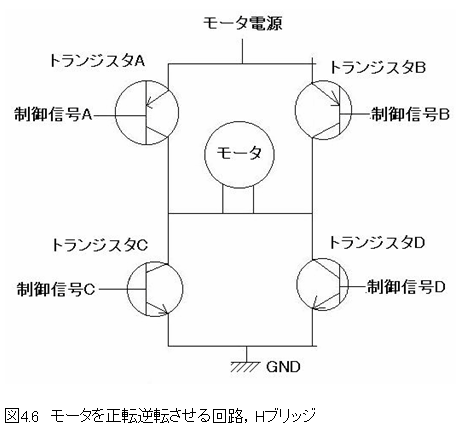
丂儌乕僞偺夞揮傪惂屼偡傞偨傔偵偼丆儌乕僞僪儔僀僶IC傪巊梡偟傑偡丏偙偙偱偼丆儌乕僞僪儔僀僶IC偵撪憼偝傟偰偄傞夞楬偵偮偄偰愢柧偟傑偡丏 丂儌乕僞僪儔僀僶IC偵撪憼偝傟偰偄傞夞楬偼H僽儕僢僕夞楬偲偄偆夞楬偱偡丏偙偺夞楬偵惂屼怣崋傪擖椡偡傞偙偲偱丆儌乕僞偺夞揮偡傞曽岦傪曄峏偡傞偙偲偑偱偒傑偡丏 H僽儕僢僕夞楬丗丂偙偺夞楬偼儌乕僞傪拞怱偵夞楬偑傾儖僼傽儀僢僩偺H偺傛偆偵側偭偰偄傞偙偲偐傜丆H僽儕僢僕夞楬偲屇傃傑偡丏偙偺夞楬偵偼4偮偺僩儔儞僕僗僞偑偮偄偰偄傑偡丏偙傟傜僩儔儞僕僗僞偼丆怣崋偵傛偭偰ON/OFF傪愗傝懼偊傞偙偲偑偱偒傞僗僀僢僠偱偡丏 丂恾4丏6偺A丆D偺僩儔儞僕僗僞偑俷俶偲側傞偲偒丆揹棳偼儌乕僞揹尮仺僩儔儞僕僗僞A仺儌乕僞仺僩儔儞僕僗僞D仺GND偺曽岦偵棳傟傑偡丏師偵丆B丆C偺僩儔儞僕僗僞偺儁傾偑ON偲側傞偲偒儌乕僞偵棳傟傞揹棳偺岦偒偼愭傎偳偲偼媡曽岦丆偮傑傝丆儌乕僞揹尮仺僩儔儞僕僗僞B仺儌乕僞仺僩儔儞僕僗僞D仺GND偺曽岦偵棳傟傑偡丏儌乕僞偵棳傟傞揹棳偺曽岦偑曄傢傞偺偱丆儌乕僞偺夞揮曽岦傪僐儞僩儘乕儖偱偒傑偡丏H僽儕僢僕偵偼偙偺懠偵俀偮偺儌乕僪偑懚嵼偟傑偡丏侾偮偼僗僩僢僾儌乕僪偲屇傃丆偙傟偼係偮慡偰偺僩儔儞僕僗僞偑OFF偺忬懺偵偡傞偺偱丆儌乕僞偵偼揹棳偑棳傟傑偣傫丏偙傟偼DC儌乕僞偺抂巕傪偳偙傕偮側偑側偄忬懺偲傎傏摨偠偱丆庤偱幉傪夞偣偽掞峈柍偔傑傢偣傑偡丏傕偆侾偮偼丆僽儗乕僉儌乕僪偲屇傃傑偡丏偙傟偼僩儔儞僕僗僞偺C偲D傪ON偲偟偨応崌偱偡偑丆GND傪宱桼偟偰俀偮偺儌乕僞偺抂巕偑僔儑乕僩偟偨忬懺偵側傝傑偡丏偙偺偲偒偼幉傪庤偱夞偡偲掞峈椡傪姶偠傞偲巚偄傑偡丏偙偺尨棟偼揹帴桿摫偵傛傞傕偺偱偡偑丆徻偟偄愢柧偼徣棯偟傑偡丏傑偨丆幚嵺偵慻傑傟傞H僽儕僢僕偼傕偭偲暋嶨側夞楬傪峔惉偟偰偄傑偡丏 |
|
|
| 僽儗乕僉偲僗僩僢僾偺堘偄丗 僽儗乕僉偼儌乕僞偺幉傪夞偡偲掞峈椡傪姶偠傑偡丏僗僩僢僾偼幉傪傑傢偡偲掞峈柍偔夞傝傑偡丏 |
儌乕僞惂屼偺曽朄 PWM婡擻傪巊梡偟偨丆儌乕僞偺惂屼傪PWM惂屼偲偄偄傑偡丏儌乕僞傪幚嵺偵惂屼偡傞偲偒偼丆PWM怣崋傪儌乕僞僪儔僀僶IC偵擖椡偟丆儌乕僞僪儔僀僶IC偑儌乕僞偺揹尮傪崅懍偱ON/OFF傪峴偄傑偡丏PWM惂屼偲偼儌乕僞偵棳傟傞揹棳傪偙偺曽朄偱僐儞僩儘乕儖偡傞惂屼朄偱偡丏 |
昞4.1丂儌乕僞僪儔僀僶IC乮TA8429H乯偺儘僕僢僋昞
| 惂屼怣崋0 | 惂屼怣崋1 | 儌乕僞 |
| 1 | 1 | 僽儗乕僉 |
| 1 | 0 | 惓揮 |
| 0 | 1 | 媡揮 |
| 0 | 0 | 僗僩僢僾 |
| 儌乕僞僪儔僀僶IC傊憲傞惂屼怣崋偼丆H8偺億乕僩1僨乕僞儗僕僗僞乮P1DR丗H'FFFFC2乯偐傜弌椡偟傑偡乮婎斅忋偱攝慄偝傟偰偄傑偡乯丏杮幚尡偱嶌惉偟偨儘儃僢僩僐儞僩儘乕儔偵偼儌乕僞僪儔僀僶IC傪係偮搵嵹偟偰偄傑偡偑丆P1DR偺弌椡偲係偮偺儌乕僞僪儔僀僶IC傊偺擖椡偺娭學偼師偺昞偺傛偆偵側偭偰偄傑偡丏bit斣崋偺戝偒偄曽偑惂屼怣崋1偲側傝傑偡丏 |
| P1DR偺bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 儌乕僞僪儔僀僶 | 儌乕僞僪儔僀僶IC3 | 儌乕僞僪儔僀僶IC2 | 儌乕僞僪儔僀僶IC1 | 儌乕僞僪儔僀僶IC0 | ||||
| 惂屼怣崋 | 惂屼怣崋1 | 惂屼怣崋0 | 惂屼怣崋1 | 惂屼怣崋0 | 惂屼怣崋1 | 惂屼怣崋0 | 惂屼怣崋1 | 惂屼怣崋0 |
| 弶婜抣 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 椺丗儌乕僞侽偺傒惓夞揮偝偣傞 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
|
儌乕僞僪儔僀僶IC0丗丂bit0丆1 師偺壽戣4丏3偱偼PWM偺僾儘僌儔儉偵儌乕僞惂屼怣崋傪壛偊偨MOTOR僾儘僌儔儉偺彂偒崬傒傪峴偄丆儌乕僞傪摦嶌偝偣傑偡丏 |